


မကြာသေးမီနှစ်များအတွင်း၊ အင်တာနက်၏ စဉ်ဆက်မပြတ်ရေပန်းစားလာမှုနှင့်အတူ e-commerce သည် လျင်မြန်စွာ တိုးတက်လာသည်။ ဖောက်သည်များ၏ မှာယူမှုကုန်စည်များသည် အမျိုးအစားများစွာ၊ အစုလိုက်အနည်းအကျဉ်းနှင့် ပေးပို့သည့်ကာလတို၏ ဝိသေသလက္ခဏာများကို ပြသပြီး ပေးသွင်းသူ၏ ထောက်ပံ့ပို့ဆောင်ရေးဖြန့်ဖြူးရေးစင်တာရှိ စင်များ၏ သိုလှောင်မှုသိပ်သည်းဆကို စဉ်ဆက်မပြတ်တိုးတက်စေသည်။ ဂိုဒေါင်အတွင်းသို့ ပစ္စည်းများ ဝင်ရောက်ခြင်းနှင့် ထွက်ခွာမှု အကြိမ်ရေ တိုးလာပါသည်။ အစိတ်အပိုင်းငယ်များကို ကောက်ယူမှု အရေအတွက်သည် တနေ့တခြား တိုးများလာပါသည်။ ထောက်ပံ့ပို့ဆောင်ရေး ဖြန့်ဖြူးရေး စင်တာများ ပိုများလာကာ လူများထံ ပြေးဆွဲသည့် ကားကို အခြေခံသည့် ကုန်ပစ္စည်းများ ကောက်ယူသည့်စနစ်ကို အသုံးပြုသည်။
HEGERLS (Hebei Walker Metal Products Co., Ltd.
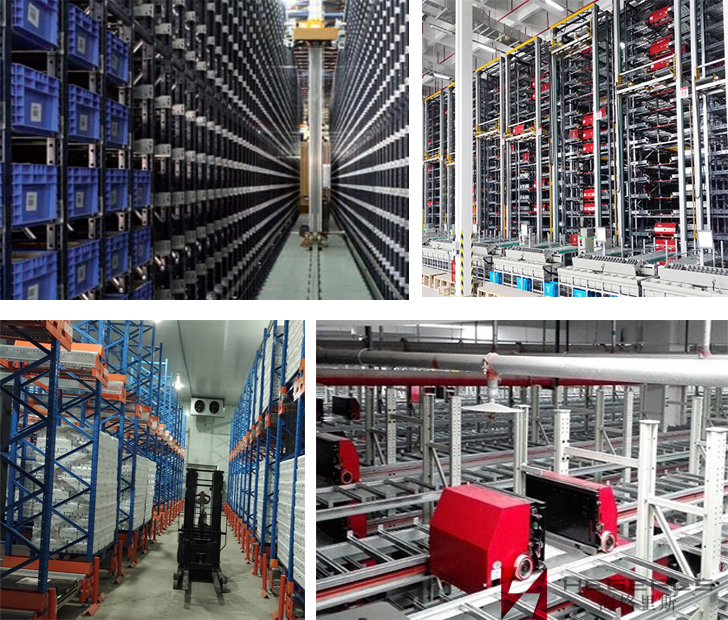
Clamping telescopic forks များကို စတီရီယိုဂိုဒေါင် အလွှာပေါင်းစုံ လွန်းပျံကားများ၊ စင်အမျိုးအစား bins AGV၊ RGV နှင့် mini load ကဲ့သို့သော အလိုအလျောက် သိုလှောင်သည့် ကိရိယာများတွင် တွင်ကျယ်စွာ အသုံးပြုပါသည်။ HEGERLS ကိုင်ဆောင်ထားသော ပစ္စည်းသေတ္တာ၏ အမြင့်ဆုံးအလေးချိန်သည် 50Kg အထိရှိသည်။ လမ်းဆုံလမ်းခွ၏ ကုပ်အကျယ်ကို 200 ~ 600mm အကွာအဝေးအတွင်း စိတ်ကြိုက်ချိန်ညှိနိုင်သည်။ အများဆုံးရွေးချယ်မှုခရီးသည် 840 မီလီမီတာဖြစ်သည်။ တယ်လီစကုပ်ခက်ရင်း၏ အမြင့်ဆုံးလည်ပတ်နှုန်းမှာ 1.5m/s ဖြစ်ပြီး အရှိန်သည် 1.2m/s ² ဖြစ်သည်။ လည်ပတ်ဆူညံသံကို 75dB အတွင်း ထိန်းချုပ်ထားပြီး၊ တစ်ခုတည်းနှင့် နှစ်ထပ် တိုးချဲ့ဆောင်အများစု၏ လိုအပ်ချက်များကို ဖြည့်ဆည်းပေးနိုင်သည်။ HEGERLS သည် ဆုပ်ကိုင်ထားသော အကျယ်၊ ကောက်သည့် လေဖြတ်ခြင်း နှင့် အခြားသော ကန့်သတ်ချက်များ ကဲ့သို့သော သုံးစွဲသူများ၏ သီးသန့်လိုအပ်ချက်များနှင့်အညီ ဖမ်းဆုပ်ထားသော တယ်လီစကုပ်ပုံး၏ အလွှာပေါင်းစုံ ပြေးဆွဲနေသည့် ကားစတီရီယိုစကုပ်ဂိုဒေါင်ကိုလည်း စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်။
Hiygris HEGERLS တွင်ရှိသော အစိတ်အပိုင်းများကို တယ်လီစကုပ် ခက်ရင်းသေတ္တာအတွင်း အလွှာပေါင်းစုံ ပြေးဆွဲနေသည့် ကားစတီရီယိုဂိုဒေါင် တယ်လီစကိုပင် ခက်ရင်းသည် စတီရီယိုဂိုဒေါင်တွင် အသုံးပြုသည့် တယ်လီစကုပ်ယန္တရားဖြစ်ပြီး ပစ္စည်းသိုလှောင်ခြင်း သို့မဟုတ် လွှဲပြောင်းခြင်းအတွက် ထောက်ပံ့ပို့ဆောင်ရေး အလိုအလျောက် သိုလှောင်မှုစနစ်တို့ ဖြစ်သည်။ ၎င်းတွင် လိုက်လျောညီထွေရှိသော နှစ်လမ်းသွား အလိုအလျောက် ချဲ့ထွင်မှုလုပ်ဆောင်ချက်နှင့် တိကျသောကန့်သတ်လုပ်ဆောင်ချက် ပါရှိသည်။ ၎င်းကို stacker တွင်တိုက်ရိုက်တပ်ဆင်နိုင်သည်၊ သို့မဟုတ် fixed lifting ယန္တရားပေါ်တွင်တပ်ဆင်နိုင်သည်၊ သို့မဟုတ် mobile lifting platform ပေါ်တွင်တပ်ဆင်နိုင်သည်။ stacker သည် ပစ္စည်းများကို အလိုအလျောက်ဝင်ရောက်ရန် သို့မဟုတ် လွှဲပြောင်းရန်အတွက် စင်များကြားရှိ ကားလမ်းတစ်လျှောက်တွင် ပြေးနေသည်။ ထုတ်လုပ်မှုလိုင်းစနစ်နှင့် လုပ်ငန်းစီမံခန့်ခွဲမှုစနစ်တို့နှင့် ချိတ်ဆက်နိုင်သည်။ သတင်းအချက်အလက် ဉာဏ်ရည်ထက်မြက်သော စီမံခန့်ခွဲမှုနှင့် လုပ်ဆောင်ချက်များကို သိရှိနားလည်ရန် ကွန်ပျူတာနှင့် ဘားကုဒ်နည်းပညာ (ကုဒ်ဒါ) ကို အသုံးပြုသည်။

HEGERLS Clamping Telescopic Fork အကြောင်း
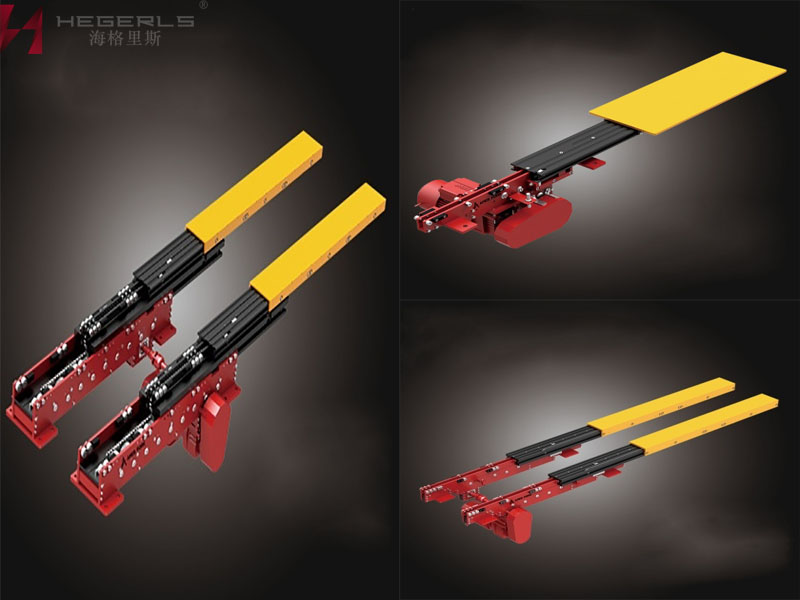
HEGERLS telescopic gripper fork သည် stackers ၏ telescopic fork စီးရီးများတွင် ထူးခြားသော ခက်ရင်းအမျိုးအစားဖြစ်ပြီး၊ ပြောရရင်၊ ကိုင်ဆောင်ထားသော ဂရစ်ပါခက်ရင်း သို့မဟုတ် ကိုင်ဆောင်ထားသော ခက်ရင်း၊ ခက်ရင်းခက် သို့မဟုတ် ခက်ရင်းခက်ရင်းဟုလည်း သိကြသည့် နှစ်လမ်းသွား အော်တိုတယ်လီစကိုပင် ခက်ရင်း၊ . ၎င်းသည် သေးငယ်သောပုံးများကို လွှဲပြောင်းရန်အတွက် အထူးအသုံးပြုသော ခက်ရင်းတစ်ခုဖြစ်သည်။ လမ်းဆုံလမ်းခွနှင့် လီဗာ(ချိတ်)၏ လက်ကိုင်ကို ချဲ့ထွင်ခြင်းဖြင့် AGV ရွေးချယ်ခြင်း သို့မဟုတ် အခြားလုပ်ငန်းသုံး ပလပ်ဖောင်းပေါ်တွင် အထပ်ပေါင်းများစွာ တိုက်ရိုက်စုဝေးနိုင်သည် သို့မဟုတ် လွှဲပြောင်းလုပ်ဆောင်ချက်ကို ပြီးအောင်လုပ်ပါ။
HEGERLS gripper ခက်ရင်းကို အများအားဖြင့် အလူမီနီယမ်အလွိုင်းဖြင့် ပြုလုပ်ထားပြီး သေးငယ်သောအရွယ်အစား၊ ပေါ့ပါးသော၊ အမြန်ပြေးနှုန်းနှင့် ချောမွေ့စွာချဲ့ထွင်မှုတို့ ပါဝင်ပါသည်။ တစ်ချိန်တည်းမှာပင်၊ ၎င်းသည် တူညီသော telescopic fork ယန္တရားအား မတူညီသော သတ်မှတ်ချက်များ၏ သေတ္တာများကို လွှဲပြောင်းရန် သို့မဟုတ် ဝင်ရောက်ရန် အသုံးပြုနိုင်ကြောင်း နားလည်သဘောပေါက်ပြီး Multi motor synchronization ၏ နိယာမကိုလည်း လက်ခံပါသည်။ ၎င်းသည် သိုလှောင်မှု စွမ်းဆောင်ရည်ကို ထိထိရောက်ရောက် မြှင့်တင်ပေးရုံသာမက အထူးသဖြင့် အထပ်မြင့် ပြင်းထန်သော Intelligent warehousing အတွက် အာကာသ အသုံးချမှုနှုန်းကို များစွာ မြှင့်တင်ပေးပါသည်။
HEGERLS တယ်လီစကုပ်ခက်ရင်းဖွဲ့စည်းပုံတွင် ကလစ်
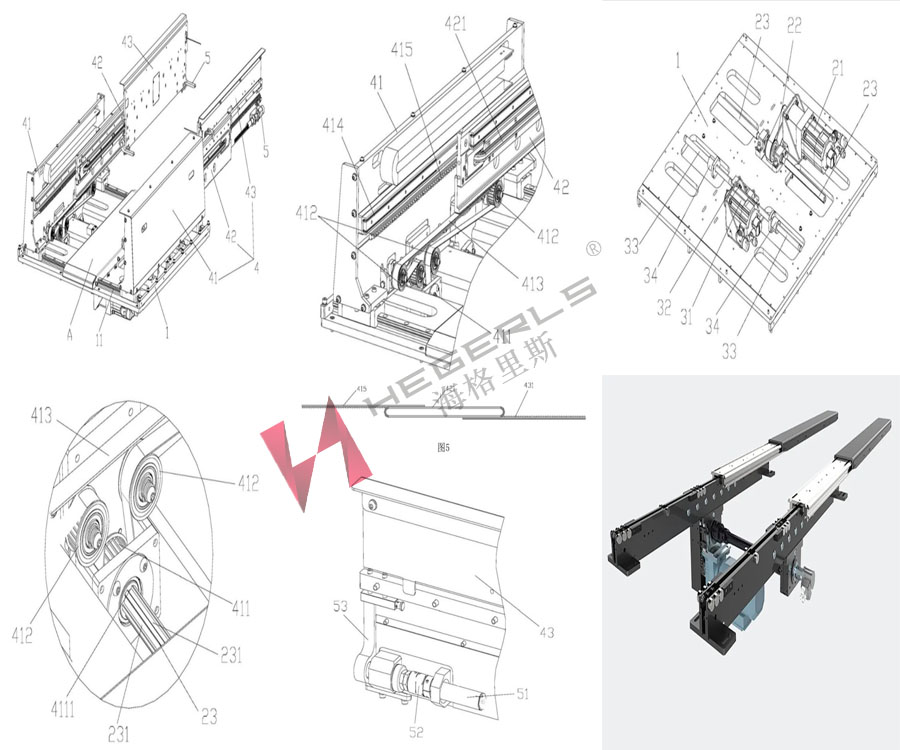
HEGERLS gripper fork ၏ ဖွဲ့စည်းပုံကို နက်ရှိုင်းသော သိုလှောင်ရာနေရာ နှင့် ရေတိမ်ပိုင်း သိုလှောင်မှု တည်နေရာ ဟူ၍ ခွဲခြားနိုင်သည်။ နက်ရှိုင်းသော သိုလှောင်မှုတည်နေရာသည် ပစ္စည်းသေတ္တာနှစ်လုံးပါသည့် သိုလှောင်တည်နေရာဖြစ်ပြီး တိမ်သောနေရာသည် ပစ္စည်းသေတ္တာတစ်ခုပါရှိသော သိုလှောင်တည်နေရာဖြစ်သည်။ ဆိုလိုသည်မှာ၊ သိုလှောင်မှုနေရာသည် တစ်ကြိမ်လျှင် ပစ္စည်းသေတ္တာနှစ်လုံးကို ကုပ်နိုင်သော်လည်း တိမ်သောနေရာသည် တစ်ကြိမ်လျှင် ပစ္စည်းသေတ္တာတစ်ခုသာ ချိတ်နိုင်သည်။ HEGERLS gripper fork နှင့် သာမန် duplex telescopic fork အကြား ကွာခြားချက်မှာ လက်ချောင်းဆွဲခက်ရင်းတွင် ခက်ရင်းခွကိုယ်ထည် (၃)ခုဖြင့် ဖွဲ့စည်းထားဆဲဖြစ်ပြီး၊ ပြောရရင် အတွင်းခက်ရင်း၊ အလယ်လမ်းဆုံကိုယ်ထည်နှင့် အပြင်ဘက်ခက်ရင်းခွကိုယ်ထည်မှလွဲ၍ ကျန်လမ်းဆုံလမ်းခွကိုယ်ထည်၊ လမ်းညွှန်ရထား (slide rail)၊ roller bar၊ synchronous wheel၊ synchronous belt၊ fluent bar၊ shift rod (hook)၊ jacking shaft၊ wheel bar၊ drive motor (servo) တို့နှင့် လိုက်ဖက်သော နောက်ထပ်ဆွဲတံ (ချိတ်)၊ ၊ shift rod motor ထောက်လှမ်းကိရိယာနှင့် အခြားအစိတ်အပိုင်းများသည် ဝင်ရောက်ခြင်း သို့မဟုတ် လွှဲပြောင်းခြင်းလုပ်ဆောင်ချက်ကို အပြီးသတ်ရန် telescopic fork arm နှင့် clutch (ချိတ်) တို့နှင့် ပူးပေါင်းလုပ်ဆောင်သည့် ပြီးပြည့်စုံသော telescopic ယန္တရားတစ်ခုဖြစ်သည်။
တယ်လီစကုပ်ခက်ရင်းပေါ်တွင် HEGERLS ၏လုပ်ဆောင်မှုနိယာမ
HEGERLS gripper ခက်ရင်း၏ ခက်ရင်းမှာ ဘေးဘက်ရပ်နေပြီး လမ်းပြရထားလမ်းဖြင့် ဘေးတိုက်ချိတ်ဆက်ထားသည်။ ထိန်းချုပ်မှုမှတဆင့်၊ လမ်းညွှန်ရထားသည် လမ်းဆုံလမ်းဆုံနှစ်ခုကြားရှိ အကွာအဝေးကို ချိန်ညှိရန်၊ အမျိုးအစားအစုံအလင်ရှိသော ပစ္စည်းသေတ္တာများအတွက် ခက်ရင်းတစ်ခု၏ ဘုံအသုံးပြုမှုကို ရရှိစေရန်အတွက် လမ်းပြရထားသည် အလှည့်အပြောင်းဖြစ်သည်။ ပစ္စည်းများ ကောက်ယူသည့်အခါ၊ ခက်ရင်းသည် ပစ္စည်းသိုလှောင်သည့် အနေအထားသို့ တိုးသွားသည်၊ ထိန်းသိမ်းထားသော ချိတ် (လီဗာ) သည် အလိုအလျောက် နိမ့်ကျသွားကာ ပုံး သို့မဟုတ် ပလပ်စတစ်ပုံး၏ အဆုံးမျက်နှာကို ပိတ်ဆို့ကာ၊ ထို့နောက် ခက်ရင်းက ပြန်နုတ်ကာ ပုံး သို့မဟုတ် ပလပ်စတစ်ပုံးကို အလယ်သို့ ဆွဲယူသွားသည် ။ ခက်ရင်းကို၊ ထို့နောက် ဒီဂရီသတ်မှတ်ချက်များနှင့်အညီ ပြောင်းပြန်ရွှေ့ကာ၊ ချိတ် (လီဗာ) ကို နောက်သို့ဆွဲထုတ်ကာ ကောက်နှုတ်ခြင်း သို့မဟုတ် လွှဲပြောင်းခြင်းလုပ်ငန်းကို ပြီးမြောက်ရန် ခက်ရင်းက နောက်တစ်ကြိမ် ပြန်နုတ်သည်။ Gripper ခက်ရင်း၏နိယာမသည် သာမာန် telescopic fork နှင့် တူညီသော်လည်း၊ ဂီယာအစိတ်အပိုင်းများ၊ ချိတ်ချောင်းများနှင့် လက်ချောင်းခက်ရင်း၏ အခြားအစိတ်အပိုင်းများသည် အလွန်ကွာခြားပါသည်။ ကွင်းဆက်ဘီး၊ ကွင်းဆက်၊ ဂီယာ၊ ထိန်သိမ်းစသည်ဖြင့် အားလုံးကို synchronous wheels၊ synchronous belts စသည်တို့ဖြင့် အစားထိုးထားပြီး၊ လျှောလက်မောင်းသည် လမ်းညွှန်ရထားများကို အသုံးပြုကာ ခက်ရင်းခန်ဓာကိုယ်ထည်ပစ္စည်းများအားလုံးကို သတ္တုစာရွက်များဖြင့် အစားထိုးထားကြောင်း ဖော်ပြရန် ၎င်းကို အသုံးပြုထားသည်။ သို့မဟုတ် အလူမီနီယမ်အလွိုင်းပစ္စည်းများ၊ ထို့ကြောင့် လက်ကိုင်ခက်ရင်း၏အလေးချိန်မှာ 80 ကီလိုဂရမ်ခန့်သာရှိသည်။
ထို့အပြင်၊ gripper အမျိုးအစား telescopic ခက်ရင်း၏ ဒီဇိုင်းတွင်၊ သိပ်သည်းသော သိုလှောင်စင်များ၏ အရွယ်အစား၊ သေတ္တာများပါရှိသည့် စင်များ၏ ဒေါင်လိုက် အနေအထား၊ ခြေရာခံအဆင့်နှင့် သေတ္တာများ၏ အရွယ်အစားတို့ကို ပေါင်းစပ်ဆုံးဖြတ်ရန် လိုအပ်ကြောင်း သတိပြုသင့်သည်။ စင်ပေါ်ရှိ ကွန်တိန်နာများ၏ လိုအပ်ချက်များကို ဖြည့်ဆည်းရန်အတွက် တိုးချဲ့ချိတ်များ (extension fork ရွေ့လျားမှု၊ အကွာအဝေး၊ ခက်ရင်းအကျယ်၊ ခက်ရင်းခွအတွင်းပိုင်းအကျယ်၊ ခက်ရင်းခွအမြင့် စသည်ဖြင့်)၊ Clamping fork သည် ပုံးများ သို့မဟုတ် ပလပ်စတစ်သေတ္တာများတွင် ထုပ်ပိုးထားသော ထုတ်ကုန်များကို ထိရောက်စွာ လွှဲပြောင်းခြင်း သို့မဟုတ် ဝင်ရောက်ကြည့်ရှုနိုင်ပြီး ပုံမှန်မဟုတ်သော ပစ္စည်းများ လွှဲပြောင်းခြင်း မပြုလုပ်နိုင်ပါ။ ထို့အပြင်၊ လွှဲပြောင်းပစ္စည်းသေတ္တာ၏ ထုထည်နှင့် အလေးချိန်သည် ကြီးလွန်းမနေသင့်ဘဲ ဝန်အလေးချိန် 100KG ထက် မပိုသင့်ပါ။ ကုပ်ခက်ရင်း၏အမြင့်ကို ပုံး၏အမြင့်အရ ယေဘုယျအားဖြင့် ဒီဇိုင်းထုတ်ထားသည်။
Shuttle ရှိ HEGERLS Clip အကြောင်း
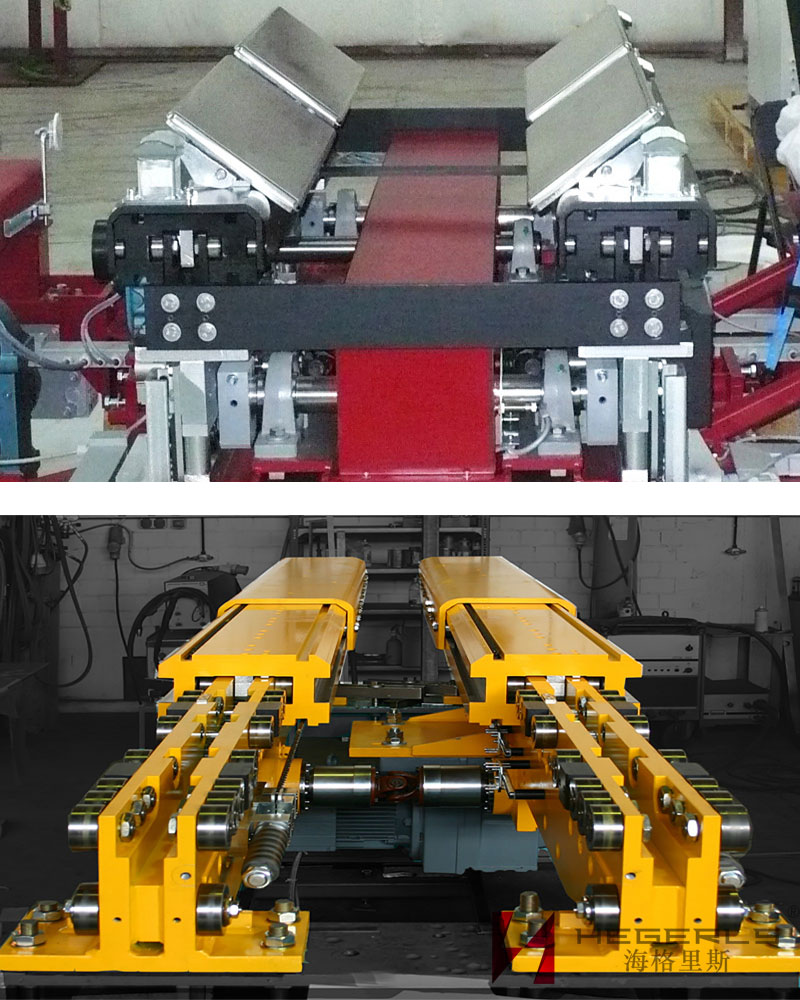
လွန်းပျံယာဉ်ပေါ်ရှိ HEGERLS ကလစ်၏ ဖွဲ့စည်းပုံတွင် လွန်းပျံယာဉ်ဘောင်၊ လွန်းပျံကိုယ်ထည်၊ ခရီးသွားယန္တရား၊ ဆင့်ပွားလမ်းဆုံ တိုးချဲ့ယန္တရား၊ စုဆောင်းသူ၊ ထမ်းတင်ပြားနှင့် ထမ်းစင်ပလပ်ဖောင်းတို့ ပါဝင်သည်။ ဖွဲ့စည်းပုံမှာ အောက်ပါအတိုင်းဖြစ်သည်။
လွန်းပျံယာဉ်ဘောင်သည် အများအားဖြင့် နှစ်ဖက်စလုံးရှိ ပင်မကိုယ်ထည်ကွင်းစကွင်းပိတ်များပါ၀င်သော အပိတ်အပေါက်တစ်ခုဖြစ်ပြီး အခွံနှင့် အတွင်းအချက်အချာကွင်းကွင်းများဖြစ်ပြီး လွန်းပျံကိုယ်ထည်၏အစွန်းနှစ်ဖက်တွင် အသီးသီးစီစဉ်ထားသည်။ အခွံကို လှည့်ပတ်တံခါးပတ္တာဖြင့် အဖွင့်အပိတ်လုပ်နိုင်သော အပေါ်အဖုံးတစ်ခုပါရှိသည်။ အချက်အချာကွင်း၏အထက်တွင် panel wire rack ကိုစီစဉ်ထားသည်။ ခရီးသွားယန္တရားတွင် မောင်းနှင်ဘီး၊ passive wheel၊ DC brushless motor၊ reducer နှင့် connecting shaft တို့ပါ၀င်သည် ။ လွန်းပျံယာဉ်ကိုယ်ထည်၏ တစ်ဖက်စွန်းရှိ လွန်းပျံယာဉ်ဘောင်၏ ဘေးနှစ်ဖက်တွင် ရှပ်များကို ချိတ်ဆက်ထားသော မောင်းနှင်ဘီးများဖြင့် ချိတ်ဆက်ပေးထားပြီး လွန်းပျံယာဉ်ကိုယ်ထည်၏ အခြားတစ်ဖက်စွန်းရှိ လွန်းပျံယာဉ်ကိုယ်ထည်၏ တစ်ဖက်တစ်ချက်စီတွင် ရှပ်များကို ချိတ်ဆက်ထားသော passive wheels များဖြင့် ပံ့ပိုးပေးထားသည်။ DC brushless motor သည် မောင်းနှင်ဘီးကို မောင်းနှင်ရန်နှင့် passive wheel ကို မောင်းနှင်ရန်အတွက် reducer နှင့် ပူးပေါင်းသည်။ ချိတ်ဆက်ထားသော ရှပ်ကို သံလိုက်ကုဒ်ပြောင်းကိရိယာဖြင့် ပံ့ပိုးပေးထားပြီး ဖြောင့်လမ်းကြောင်းပေါ်ရှိ လွန်းပျံယာဉ်၏ အစနှင့် ရပ်တန့်သည့် အနေအထားများကို ရရှိသည်။ ဆင့်ပွားလမ်းဆုံ တိုးချဲ့ယန္တရားကို လွန်းပျံယာဉ်ဘောင်၏ အတွင်းဘက်ခြမ်းတွင် အချိုးကျစွာ စီစဉ်ထားသည်။ အလယ်တန်းလမ်းဆုံ တိုးချဲ့ယန္တရားများကြားရှိ လွန်းပျံယာဉ်ကိုယ်ထည်အား ကုန်တင်ခြင်းတောင်းကို နေရာချရန်အတွက် ထမ်းတင်ပလပ်ဖောင်းတစ်ခု ပေးထားသည်။ ပြေးဆွဲနေသည့် ကားဘောင်၏ အပိတ်အပေါက်ကို မောင်းနှင်ပြားတစ်ခု၊ ခရီးသွားယန္တရား၏ ပင်မထိန်းချုပ်ပန်းကန်နှင့် လမ်းဆုံလမ်းခွတိုးချဲ့ယန္တရား၏ ပင်မထိန်းချုပ်ပန်းကန်ပြားတို့ကို အသီးသီးစီစဉ်ပေးထားသည်။ မောင်းနှင်သည့်ပန်းကန်ပြားသည် လမ်းကြောင်းဖြောင့်တွင် ပြေးဆွဲရန် လွန်းပျံယာဉ်ကို မောင်းနှင်ရန် ခရီးသွားယန္တရားကို မောင်းနှင်ပေးသည်။ ခရီးသွားယန္တရား၏ ပင်မထိန်းချုပ်မှုဘုတ်အဖွဲ့သည် ပြေးဆွဲနေသည့် ဘောင်များကို ထိန်းချုပ်ထားပြီး လွန်းပျံယာဉ်၏ ရပ်တန့်နေသော အနေအထားများကို ထိန်းချုပ်ကာ တောင်းကို စင်ပေါ်တင်ရန် တောင်းကို ဖမ်းပြီး စင်ပေါ်တင်ရန် ခက်ရင်းတိုးချဲ့ယန္တရား၏ ပင်မထိန်းချုပ်ဘုတ်အဖွဲ့၊ စုဆောင်းသည့်ကိရိယာကို လမ်းကြောင်းဖြောင့်အတွင်း၌ စီထားသော လျှပ်စစ်ဝါယာကြိုးဖြင့် ချိတ်ဆက်ထားပြီး လွန်းပြန်ကားအတွက် ပါဝါထောက်ပံ့ရန် အသုံးပြုသည့် လွန်းပျံယာဉ်နှင့် လမ်းကြောင်းဖြောင့်ကြားတွင် စုဆောင်းကိရိယာကို တပ်ဆင်ထားသည်။ သိုလှောင်ရန်အတွက် ဉာဏ်ရည်မြင့်လွန်းသည့်ကားပေါ်ရှိ ကလစ်၏ဖွဲ့စည်းတည်ဆောက်ပုံအင်္ဂါရပ်မှာ မောင်းနှင်ဘီးနှင့် passive wheel အသီးသီးချိတ်ဆက်ထားသော shaft ကိုဆက်သွယ်သည့်နေရာများတွင် grooves များကိုသတ်မှတ်ထားပြီး elastic retainer ring ကို groove တွင်သတ်မှတ်ထားသည်။ မောင်းနှင်ဘီးနှင့် passive ဘီး၏တည်နေရာ။ နှစ်ထပ်လမ်းညွှန်ဘီးများကို မောင်းနှင်ဘီးအောက်ရှိ လွန်းပျံကိုယ်ထည်၏ဘေးဘက်တွင် အသီးသီးသတ်မှတ်ထားပြီး လမ်းဖြောင့်လမ်းကြောင်းနှင့် လွန်းပျံကိုယ်ထည်ကြားတွင် အသီးသီးသတ်မှတ်ထားသည်။ မောင်းနှင်ဘီးနှင့် Passive ဘီးတို့သည် ဖြောင့်လမ်းကြောင်းပေါ်တွင် လည်ပတ်နေသောအခါတွင် လမ်းညွှန်ဘီးနှစ်ထပ်ဘီးများသည် ဘယ်ညာ ကန့်သတ်ချက်များကို ဖြစ်ပေါ်စေပါသည်။ ဆင့်ပွားလမ်းဆုံ တိုးချဲ့ယန္တရားတွင်- ပထမအဆင့် ခက်ရင်း တိုးချဲ့ တွန်းပြား၊ ဒုတိယ အဆင့် ခက်ရင်း တိုးချဲ့ ပြား၊ ဒုတိယ အဆင့် ထပ်တူကျသည့် ပူလီယန္တရား၊ ဒုတိယ အဆင့် ခက်ရင်း တိုးချဲ့ မောင်းနှင်မှု ယန္တရား၊ လမ်းဆုံ တိုးချဲ့ မောင်းနှင် မော်တာ၊ အခြား အတားအဆီး နှင့် မောင်းတံ ; shuttle car frame ၏ hub bracket ၏ အပြင်ဘက်ခြမ်းတွင် ပထမအဆင့် fork extension push plate ကို ပေးထားသည်။ ပထမအဆင့် ခက်ရင်းတွန်းပန်းကန်၏အလယ်တွင် U ပုံသဏ္ဌာန်ချဲတစ်ခုကို စီစဉ်ထားပြီး U-shaped ချွဲပူလီအများအပြားကို U-ပုံသဏ္ဌာန်ချုံးအတွင်း ညီတူညီမျှအကွာအဝေးတွင်စီစဉ်ထားသည်။ အလယ်တန်းခက်ရင်းပန်းကန်ကို U ပုံသဏ္ဌာန်ချဲအပြင်ဘက်တွင် စီစဉ်ထားသည်။ အလယ်တန်းခက်ရင်းပန်းကန်ကို ဘောလီများနှင့် အခွံမာသီးများမှတစ်ဆင့် U-shaped groove ပူလီများနှင့် ချိတ်ဆက်ထားသည်။ ဒုတိယအဆင့် ခက်ရင်း တိုးချဲ့အပြား၏ ထိပ်စွန်းများကို ဆိုင်းရန်းခက်ရင်း၊ DC ဂြိုလ်လျှော့မော်တာ နှင့် အပြင်မှ အတွင်းဘက်ထိ ဓာတ်ပုံလျှပ်စစ် အာရုံခံကိရိယာ တို့ဖြင့် အသီးသီး ပံ့ပိုးပေးထားသည်။ photoelectric အာရုံခံကိရိယာအား လမ်းဆုံလမ်းခွ၏ အနေအထားအချက်ပြမှုကို ရယူရန်နှင့် ၎င်းကို အလျားလိုက် သို့မဟုတ် ဒေါင်လိုက်ရွေ့လျားစေရန် DC planetary reducer motor ကို ထိန်းချုပ်သည့် ခက်ရင်းခွဲယန္တရား၏ main control board သို့ ပေးပို့သည်။ အလယ်တန်း synchronous ပူလီယန္တရားအား မူလကြမ်းပြင်ပေါ်တွင် တွန်းထုတ်သည့်ပန်းကန်ပြားပေါ်တွင် အသီးသီးစီစဉ်ထားပြီး U-ပုံသဏ္ဌာန်ချုံးအောက်နှင့် အထက်တွင် တိုက်ရိုက်စီစဉ်ထားသည်။ Secondary synchronous pulley ယန္တရားကို အလယ်တန်းလမ်းဆုံ တိုးချဲ့ပြားပေါ်ရှိ synchronous ခါးပတ်နှိပ်ပြားနှင့် ချိတ်ဆက်ထားသည်။ ခက်ရင်းခွဲဒရိုက်မော်တာနှင့် အခြားအလျှော့ပေးသည့်ကိရိယာသည် အလယ်တန်းလမ်းဆုံ တိုးချဲ့ဒရိုက်ဗ်ယန္တရားအား ရွေ့လျားရန် တွန်းအားပေးပြီး မောင်းရိုးတံကိုဖြတ်၍ ရွေ့လျားစေရန် အခြားတစ်ဖက်ရှိ အလယ်တန်းလမ်းဆုံလမ်းခွအဆက်ဆက်ဒရိုက်ဗ်ယန္တရားအား မောင်းနှင်ပါ၊ သို့မှသာ ပင်မလမ်းဆုံလမ်းခွအဆက်ဆက်အား တွန်းပြားသည် အလယ်တန်းကို ရွေ့လျားစေပါသည်။ synchronous pulley ယန္တရားကို ရွှေ့ရန်၊ ထို့ကြောင့် အလယ်တန်းလမ်းဆုံ တိုးချဲ့ပြားကို ရွှေ့ရန် တွန်းအားပေးသည်။ အဆင့်နှစ်ဆင့် ခက်ရင်းတိုးချဲ့ ဂီယာယန္တရားတွင် သံလိုက်ကုဒ်ပြောင်းကိရိယာ၊ synchronous belt pulley I၊ synchronous belt I၊ tensioning wheel device နှင့် rack ပါ၀င်ပါသည်။ အချိန်ကိုက် ခါးပတ်ပူလီ 1 နှင့် ချိန်ကိုက် ခါးပတ် 1 ကို ပထမအဆင့် ခက်ရင်း တွန်းပန်းကန်အောက် တွင် စီစဉ်ထားသည်။ synchronous belt pulley I ၏တစ်ဖက်ကို transmission shaft နှင့် ချိတ်ဆက်ထားပြီး ကျန်တစ်ဖက်ကို keyway မှတဆင့် အခြား reducer ၏ output shaft နှင့် ချိတ်ဆက်ထားသည်။ တင်းမာသောဘီးကိရိယာများကို synchronous belt Pulley I နှင့် synchronous belt I ၏ အရန်ပြင်ဆင်မှုအတွက် အခြားအလျော့အတင်း၏ နှစ်ဖက်စလုံးတွင် အသီးသီးသတ်မှတ်ထားသည်။ ပထမအဆင့် ခက်ရင်းတွန်းပန်းကန်နှင့် synchronous ခါးပတ်ကြားတွင် ထိန်သိမ်းတစ်ခုကို စီစဉ်ထားသည်။ ခက်ရင်းတိုးချဲ့မောင်းနှင်မော်တာနှင့် အခြားအလျှော့ပေးကိရိယာသည် synchronous ခါးပတ်ပူလီ I နှင့် synchronous ခါးပတ် I ကို လှည့်ပတ်ရန် တွန်းအားပေးပြီး အခြားတစ်ဖက်ရှိ synchronous ခါးပတ်ပူလီ II နှင့် synchronous ခါးပတ် II ကို ဂီယာရှပ်မှတဆင့် လှည့်ပတ်ရန် တွန်းအားပေးသည်။ တစ်ချိန်တည်းမှာပင်၊ နှစ်ဖက်စလုံးရှိ ထိန်သိမ်းများသည် ပင်မခက်ရင်းတိုးချဲ့မှုကို ရရှိရန်အတွက် သက်ဆိုင်ရာပင်မခက်ရင်းအဆက်အစပ်ကို တွန်းထုတ်သည့်အပြားကို တွန်းပို့ပေးသည်။ ဆင့်ပွား synchronous ခါးပတ် ပူလီယန္တရားသည် တပြိုင်နက်တည်း ရွေ့လျားပြီး အလယ်တန်းလမ်းဆုံ တိုးချဲ့ပြားကို ရွေ့လျားစေရန် တွန်းပို့သောအခါ၊ U-shaped ပူလီသည် U-shaped ချွဲအတွင်း လှိမ့်ကာ၊ အလယ်တန်းလမ်းဆုံ တိုးချဲ့ပြားကို ဆင့်ပွားလမ်းဆုံ တိုးချဲ့မှုကို နားလည်အောင်လုပ်ပါ။ တင်းကျပ်သောဘီးကိရိယာတွင် ဘော့လုံး၊ ချိန်ညှိကွင်း၊ တင်းမာသောဘီးကို synchronous belt I နှင့် အခြားအလျှော့အတင်း၏ နှစ်ဖက်စလုံးတွင် တပ်ဆင်ထားပြီး ပင်မကိုယ်ထည်ကွင်းကို အခွံမာနှစ်ထပ်ဖြင့် တပ်ဆင်ထားသည်။ ချိန်ညှိခြင်းကွင်းကို ဘော့မှတဆင့် ဘော့လုံးနှစ်ခုအောက်တွင် စီစဉ်ထားပြီး၊ ချိန်ညှိခြင်းကွင်း၏ အနေအထားကို ဘော့ဖြင့် ချိန်ညှိထားသောကြောင့် ချိန်ညှိခြင်းကွင်းသည် နှစ်ထပ် nut ကို အပေါ်နှင့်အောက်သို့ ရွေ့လျားစေရန် တွန်းပို့နိုင်စေရန်၊ ကျွန်ုပ်သည် synchronous belt ကို ထိန်းသိမ်းထားနိုင်စေရန်၊ tensioning wheel ၏ လုပ်ဆောင်ချက်အောက်တွင် တင်းမာမှုအခြေအနေ။
HEGERLS ပြေးဆွဲသည့်ဘတ်စ်ကားသည် လုပ်ငန်း၏အကျိုးအမြတ်များကို မည်သို့မောင်းနှင်မည်နည်း။
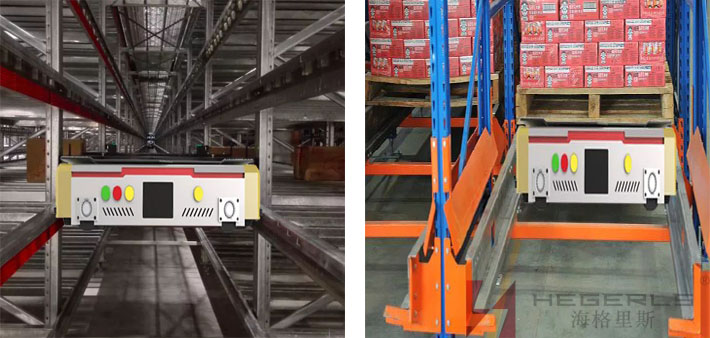
ပထမဦးစွာ၊ ခရီးဝေးယန္တရား၊ ခက်ရင်းခွဲယန္တရားနှင့် ဖရိန်၊ လျှောအဆက်အသွယ်လိုင်းနှင့် HEGERLS သိုလှောင်မှုတွင် သိမ်းဆည်းထားသော ကလစ်ပါရှိသည့် အသိဉာဏ်ရှိသော လွန်းပျံယာဉ်၏ ပါဝါစုဆောင်းကိရိယာတို့ကို ကျိုးကြောင်းဆီလျော်စွာ စီစဉ်ပေးသည့်အတွက် လွန်းပျံယာဉ်၏နေရာကို အပြည့်အဝအသုံးပြုကာ လိုက်လျောညီထွေဖြစ်အောင် လုပ်ဆောင်နိုင်သည်။ သုံးဖက်မြင်ဂိုဒေါင်ရှိ မတူညီသော သတ်မှတ်ချက်များနှင့် တည်နေရာများကို အလိုအလျောက် သိမ်းဆည်းခြင်းနှင့် ကုန်ပစ္စည်းများ ပြန်လည်ထုတ်ယူခြင်း၊ လွန်းပျံယာဉ်၏ လျှောက်လွှာလွှမ်းခြုံမှုကို ချဲ့ထွင်ခြင်းနှင့် လမ်းလျှောက်ခြင်း၊ လမ်းဆုံလမ်းခွ တိုးချဲ့ခြင်း၊ ကောက်ခြင်းကဲ့သို့သော လွန်းပျံယာဉ်၏ ဆက်တိုက်လုပ်ဆောင်မှုများစွာကို လျင်မြန်ထိရောက်စွာ ပြီးမြောက်စေပါသည်။ ကုန်ပစ္စည်းများတင်ခြင်းနှင့် ကုန်ပစ္စည်းများ လျင်မြန်တိကျစွာ သိုလှောင်ခြင်းတို့ကို သိရှိနားလည်ပြီး အလိုအလျောက်ကုန်လှောင်ရုံ၏ လည်ပတ်မှုထိရောက်မှုနှင့် အလိုအလျောက်စနစ်နည်းပညာအဆင့်ကို သိသိသာသာ မြှင့်တင်ပေးပြီး လုပ်ငန်းများ၏ ရင်းနှီးမြှုပ်နှံမှုကုန်ကျစရိတ်များကို လျှော့ချပေးပါသည်။ တစ်ချိန်တည်းမှာပင်၊ ၎င်းသည်ဖွဲ့စည်းပုံတွင်ရိုးရှင်းပြီးပေါ့ပါးသည်၊ ယုံကြည်စိတ်ချရမှုမြင့်မားပြီးထိန်းသိမ်းရန်လွယ်ကူသည်။ ၎င်းသည် စနစ်၏ ပျော့ပြောင်းမှုကို နားလည်သဘောပေါက်ပြီး သမားရိုးကျ လမ်းဘေး stacker ကို အစားထိုးနိုင်ပြီး e-commerce ထောက်ပံ့ပို့ဆောင်ရေးနှင့် သိုလှောင်ရုံ အလိုအလျောက်စနစ်၏ ဖွံ့ဖြိုးတိုးတက်မှုလမ်းကြောင်းကို လိုက်လျောညီထွေဖြစ်စေနိုင်သည်။
ဒုတိယ၊ HEGERLS ဉာဏ်ရည်မြင့်လွန်းပျံယာဉ်၏ ခရီးသွားယန္တရားတွင်၊ မောင်းနှင်ဘီးများနှင့် passive wheels များ၏ ချိတ်ဆက်ထားသော shafts များကို grooves များဖြင့် ပံ့ပိုးပေးထားပြီး bearings ၏ ချိတ်ဆက်မှုအပိုင်းများကို ချိတ်ဆက်ခြင်း၏ axial positioning effect ကို သိရှိနားလည်ထားသည့် elastic retainer ring အမျိုးအစားအသစ်ဖြင့် ချိတ်ဆက်ထားသည်။ ရှပ်များ; axial positioning effect ကိုရရှိရန် elastic retainer ring ကိုအသုံးပြုခြင်းဖြင့်၊ ထုတ်လုပ်မှုထိရောက်မှုကိုတိုးစေပြီးကုန်ကျစရိတ်ကိုသက်သာစေနိုင်သည်။
တတိယ- လမ်းပြဘီးနှစ်ထပ်တည်ဆောက်ပုံမှ လမ်းကြောင်းမှလွဲမသွားဘဲ မောင်းနှင်ဘီးနှင့် passive wheel သည် လမ်းကြောင်းမှန်အတိုင်း အမြဲရွေ့လျားနေကြောင်း သိုလှောင်သိမ်းဆည်းရန်အတွက် Higelis HEGERLS ဉာဏ်ရည်ထက်မြက်သော လွန်းပျံကားမှ သိရှိနားလည်ပါသည်။ ဤနေရာချထားမှုဖွဲ့စည်းပုံသည် ပိုမိုတည်ငြိမ်ပြီး ယုံကြည်စိတ်ချရသည်။
စတုတ္ထ၊ HEGERLS ဉာဏ်ရည်ထက်မြက်လွန်းသည့်ကားမှ လက်ခံကျင့်သုံးသည့် အလယ်တန်းလမ်းဆုံ တိုးချဲ့ဖွဲ့စည်းပုံသည် လမ်းဆုံလမ်းခွအကွာအဝေးကို ပိုမိုဝေးကွာစေပြီး မတူညီသောနေရာများတွင် တင်းတောင်းများ ပိုမိုရရှိစေပါသည်။ တစ်ချိန်တည်းမှာပင်၊ ဒုတိယလမ်းဆုံလမ်းခွတိုးချဲ့မှုယန္တရား၏နိယာမသည်ရိုးရှင်းသည်၊ ဒီဇိုင်းနှင့်ထုတ်လုပ်သည့်ကုန်ကျစရိတ်သည်နိမ့်သည်။ ဂီယာအပိုင်းသည် ကုန်ကျစရိတ်ပိုမိုသက်သာစေပြီး လိုအပ်သော အပြင်အဆင်ကို ထိထိရောက်ရောက် လျှော့ချပေးပြီး လွန်းပြန်ကား၏ အလေးချိန်ကို လျှော့ချပေးသည့် ဆင့်ပွားလမ်းဆုံ တိုးချဲ့ယန္တရားကို ရောက်ရှိစေရန် ဂီယာအစိတ်အပိုင်းသည် တစ်ခုတည်းသော မော်တာ + အလျှော့ပေးသူ + ဂီယာရှပ်မုဒ်ကို လက်ခံပါသည်။ .
ပဉ္စမအချက်အနေဖြင့်၊ Higelis HEGERLS ဉာဏ်ရည်မြင့်လွန်းပျံကားသည် synchronous belt ကို လျင်မြန်စွာ တင်းမာနေစေပြီး လွန်းပျံကား၏ ပုံမှန်အလုပ်လုပ်ပုံကို နားလည်နိုင်စေသည့် tensioning wheel device အမျိုးအစားအသစ်ကို လက်ခံပါသည်။ ထို့အပြင်၊ ဤ tensioning wheel device သည် ရိုးရှင်းသည်၊ တပ်ဆင်ရန် အဆင်ပြေပြီး လျင်မြန်စွာ ချိန်ညှိနိုင်သည်၊ ၎င်းသည် ကုန်ကျစရိတ်ကို သက်သာစေသည်၊ နေရာချွေတာပြီး အလုပ်ထိရောက်မှုကို တိုးတက်စေသည်။
စာတိုက်အချိန်- ဒီဇင်ဘာ-၁၉-၂၀၂၂