


လူထူထပ်သော သိုလှောင်ရုံအတွက် အရေးကြီးသော သယ်ယူပို့ဆောင်ရေးကိရိယာတစ်ခုအနေဖြင့် အသိဉာဏ်ရှိသော pallet အမျိုးအစား လေးလမ်းသွားပြေးဆွဲသည့်ကားသည် ဉာဏ်ရည်ထက်မြက်သော လမ်းကြောင်းမှ အလိုအလျောက် နောက်ပြန်လှည့်ခြင်းနှင့် ခြေရာခံပြောင်းလဲနေသော သယ်ယူပို့ဆောင်ရေးကိရိယာတစ်ခုဖြစ်သည်။ လျှပ်စစ်ထိန်းချုပ်မှုစနစ်၏ ထိန်းချုပ်မှုအောက်တွင်၊ ၎င်းသည် ကုဒ်နံပါတ်များ၊ RFID၊ photoelectric အာရုံခံကိရိယာများကဲ့သို့သော ဒစ်ဂျစ်တယ်နည်းပညာများမှတစ်ဆင့် အဝင်နှင့်အထွက်ဘူတာတစ်ခုစီကို တိကျစွာနေရာချပေးကာ အသိဉာဏ်ရှိသော အချိန်ဇယားစနစ်တစ်ခု တပ်ဆင်ထားသည်။ ပစ္စည်းများ လက်ခံရရှိပြီးနောက် သယ်ယူပို့ဆောင်ရေးအတွက် အလိုအလျောက် အသွားအပြန် ပို့ဆောင်ပေးပါသည်။ Pallet လေးလမ်းသွားကားသည် လူ၏လည်ပတ်မှုမလိုအပ်ပါ၊ လျင်မြန်သောအမြန်နှုန်းနှင့် ဉာဏ်ရည်မြင့်မားသောအဆင့်၊ အမျိုးမျိုးသောထောက်ပံ့ပို့ဆောင်ရေးသိုလှောင်မှုစနစ်များအတွက်သင့်လျော်သော၊ ယူနစ်ပစ္စည်းများ၏အလိုအလျောက်အပြားလိုက်သယ်ယူပို့ဆောင်ခြင်းကို လျင်မြန်စွာအကောင်အထည်ဖော်နိုင်စေပါသည်။ ဉာဏ်ရည်ထက်မြက်သော အချိန်ဇယားဆွဲစနစ်များဖြင့် မောင်းနှင်ထားသော၊ အလွှာပေါင်းစုံနှင့် ယာဉ်ပေါင်းများစွာ ပူးပေါင်းလုပ်ဆောင်သည့် အပြိုင်လုပ်ဆောင်မှုများကို တိကျပြီး ထိရောက်သော လည်ပတ်မှုမုဒ်များရရှိစေရန် အကောင်အထည်ဖော်ဆောင်ရွက်လျက်ရှိပြီး လုပ်ငန်းဆိုင်ရာ ထောက်ပံ့ပို့ဆောင်ရေးဆိုင်ရာ သိုလှောင်မှုစနစ်များအတွက် ထောက်ပံ့ပို့ဆောင်ရေးဆိုင်ရာ ဖြေရှင်းချက်အသစ်များကို ပံ့ပိုးပေးပါသည်။
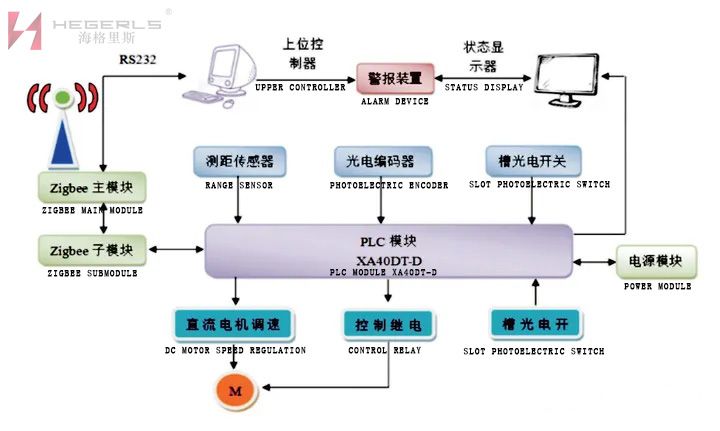
အသိဉာဏ်ဗန်းလေးလမ်းသွားလွန်းပျံယာဉ် သိုလှောင်မှုစနစ် အကောင်အထည်ဖော်ရာတွင် အဓိကအခက်အခဲများနှင့် အဓိကအချက်များမှာ ဟာ့ဒ်ဝဲယုံကြည်စိတ်ချရမှု၊ ဆက်သွယ်ရေးနှင့် နေရာချထားမှုနည်းပညာ၊ အချိန်ဇယားဆွဲခြင်းစနစ်စသည်ဖြင့် တည်ရှိနေသည်။ အထူးသဖြင့်၊ ဟာ့ဒ်ဝဲယုံကြည်စိတ်ချရမှုနှင့်ပတ်သက်၍ Hebei Woke HEGERLS သည် အဓိကအားဖြင့် ထုတ်ကုန်ယုံကြည်စိတ်ချရမှုကို ရရှိသည် ရှုထောင့်သုံးမျိုးမှ ပထမဦးစွာ၊ ယာဉ်လည်ပတ်မှုကို အချိန်နှင့်တစ်ပြေးညီ စောင့်ကြည့်စစ်ဆေးရန် ယာဉ်ကိုယ်ထည်ပေါ်တွင် အာရုံခံကိရိယာ 16 ခုကို ပြင်ဆင်သတ်မှတ်ထားသည်။ ထို့နောက် ထိန်းချုပ်မှုတည်ငြိမ်မှုကို မြှင့်တင်ရန် Siemens s7-200 SMATER စီးရီးမှ စံ PLC ကို ရွေးပါ။ ထို့အပြင်၊ HEGERLS pallet လေးလမ်းသွားလွန်းပျံယာဉ်သည် အစိတ်အပိုင်းများ ပျက်သွားသောအခါတွင် အစိတ်အပိုင်းများကို အစားထိုးရာတွင် ပိုမိုအဆင်ပြေပြီး ထိရောက်မှုရှိစေသည့် မော်ဂျူလာဒီဇိုင်းတစ်ခုလုံးကို လက်ခံပါသည်။ တစ်ချိန်တည်းမှာပင် အခြားကားငယ်များအတွက်လည်း ပံ့ပိုးကူညီမှုပေးရန် အဆင်ပြေပါသည်။ တည်ဆောက်ပုံဆိုင်ရာ အစိတ်အပိုင်းအားလုံးကို Hebei Woke မှ သီးခြားလွတ်လပ်စွာ တီထွင်ထုတ်လုပ်ထားပြီး အရည်အသွေးနှင့် တိကျမှုကို တင်းကြပ်စွာ ထိန်းချုပ်ထားသည်။
ဆက်သွယ်ရေးနှင့် နေရာချထားခြင်းနည်းပညာအရ၊ သိပ်သည်းဆမြင့်သော ကုန်ပစ္စည်းများနှင့် စင်များသည် ယေဘုယျအားဖြင့် ဆက်သွယ်ရေးအချက်ပြမှုများ ထုတ်လွှင့်ခြင်းကို အနှောင့်အယှက်ပေးသောကြောင့် pallet လေးလမ်းသွားလွန်းပျံယာဉ်နှင့် ၎င်း၏စနစ်၏ ဒေတာဖလှယ်မှုစွမ်းဆောင်ရည်ကို ထိခိုက်စေပြီး နေရာချထားမှု မမှန်ကန်ခြင်းနှင့် အနေအထားဆုံးရှုံးမှုတို့ကို ဖြစ်စေသည်။ မတူညီသောပကတိအခြေအနေများအရ Hebei Woke သည် ဂိုဒေါင်အတွင်းရှိ လေးလမ်းမောင်းယာဉ်များ၏ ချောမွေ့စွာသွားလာခြင်းအား သိရှိနိုင်ရန် ကုဒ်နံပါတ်တည်နေရာပြခြင်း၊ လေဆာတည်နေရာပြခြင်း၊ ဘားကုဒ်/နှစ်ဘက်မြင်ကုဒ်တည်နေရာပြခြင်း၊ RFID နေရာချထားခြင်းနှင့် အခြားနေရာချထားခြင်းနည်းလမ်းများကို ရွေးချယ်ထားပြီး ဂိုဒေါင်အတွင်းရှိ လေးလမ်းမောင်းယာဉ်များ ချောမွေ့စွာသွားလာခြင်းအား နားလည်သဘောပေါက်ရန်၊ ယာဉ်၏စွမ်းရည်၊ ၎င်းကိုအလိုအလျောက်ချိန်ခွင်လျှာဆွဲချနိုင်စေပြီး ချို့ယွင်းချက်တစ်ခုတည်းကို ဖယ်ရှားပေးသည်။
အချိန်ဇယားဆွဲခြင်းစနစ်အရ ဘက်စုံယာဉ်အချိန်ဇယားဆွဲခြင်းစနစ်ကို အကောင်အထည်ဖော်မှသာ လေးလမ်းသွားပြေးဆွဲသည့်ယာဉ်များ၏ အသုံးချနိုင်မှုကို များစွာတိုးတက်ကောင်းမွန်လာစေမည်ဖြစ်သည်။ HEGERLS လေးလမ်းသွား လွန်းပျံယာဉ်အစုံအလင်ကို အချိန်ဇယားဆွဲခြင်းစနစ်တွင် ကဏ္ဍလေးရပ်ပါဝင်သည်- နေရာအသွားအလာ ထိန်းချုပ်မှု၊ လုပ်ငန်းခွဲဝေမှု၊ စက်ပစ္စည်းလည်ပတ်မှု ချို့ယွင်းမှု ခွဲခြမ်းစိတ်ဖြာမှုနှင့် လမ်းကြောင်းစီစဉ်ခြင်း။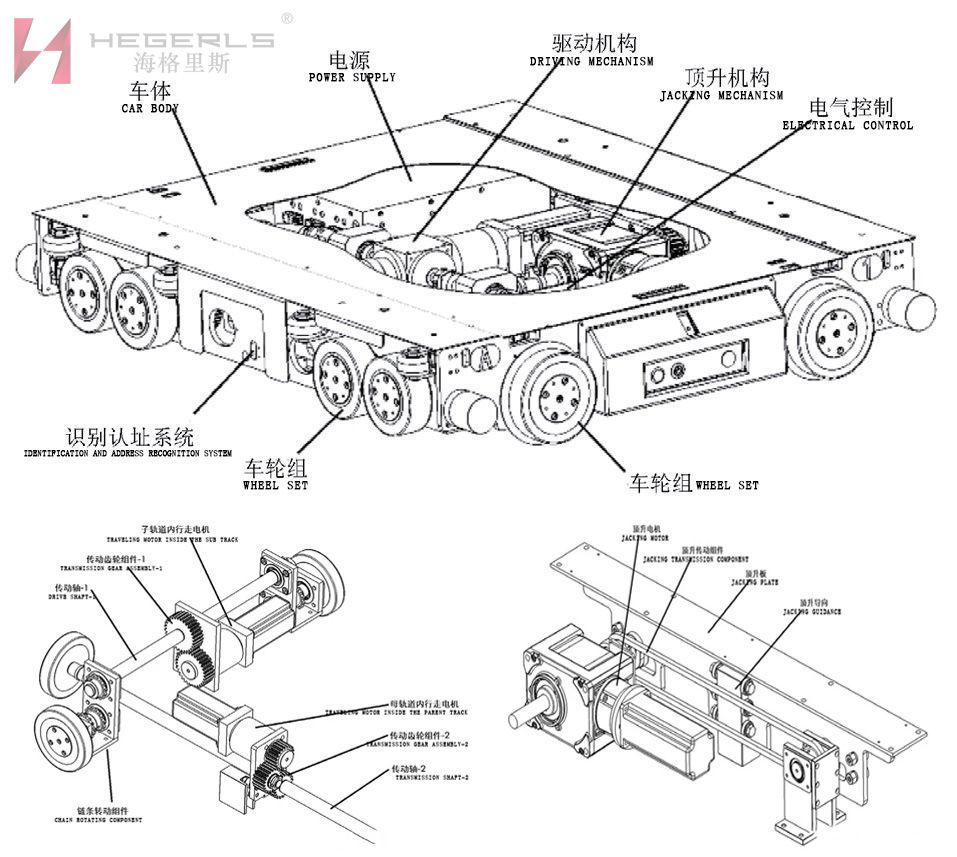
Hebei Woke မှ အမှီအခိုကင်းစွာ တီထွင်ထုတ်လုပ်ထားသော HEGERLS pallet လေးလမ်းသွားကား၏ ယန္တရားဒီဇိုင်းသည် အခြားထုတ်လုပ်သူများနှင့် ကွဲပြားသည်။ HEGERLS pallet လေးလမ်းသွားပြေးဆွဲသည့်ကား၏ အဓိကယန္တရားဒီဇိုင်းမှာ အောက်ပါအတိုင်းဖြစ်သည်။
လုပ်ငန်းလိုအပ်ချက်များအရ လေးလမ်းမောင်းယာဉ်သည် ပြေးလမ်းကြောင်းတစ်လျှောက်ရှိ စင်ပေါ်ရှိ အလွှာအသီးသီးနှင့် ကုန်တင်လမ်းကြားများတွင် လည်ပတ်မှုဆိုင်ရာတာဝန်များကို ပြီးမြောက်ရန်အတွက် အပြန်အလှန်ဓာတ်လှေကားနှင့် ပူးပေါင်းဆောင်ရွက်ပါသည်။ ဂိုဒေါင်စောင့်ကြည့်ရေးစနစ်၏ ထိန်းချုပ်မှုနှင့် အချိန်ဇယားဆွဲမှုအောက်တွင်၊ သိုလှောင်ရုံတစ်ခုလုံးသည် အလွှာပေါင်းစုံနှင့် ယာဉ်ပေါင်းများစွာကို တစ်ပြိုင်နက်တည်း လုပ်ဆောင်နိုင်မည်ဖြစ်သည်။ လေးလမ်းသွားယာဉ်တစ်ခုစီသည် လည်ပတ်နေစဉ်အတွင်း တည်နေရာ၊ အမြန်နှုန်း၊ လျှပ်စစ်ဓာတ်အား၊ ရရှိနိုင်မှု၊ ချို့ယွင်းချက်များနှင့် လုပ်ငန်းခွင်အခြေအနေများကဲ့သို့သော အချက်အလက်များကို စီမံခန့်ခွဲရေးစနစ်သို့ အပ်လုဒ်လုပ်နိုင်သည်၊ လေးလမ်းသွားယာဉ်တွင် အစုလိုက်သိမ်းဆည်းခြင်းနှင့် ပြန်လည်ထုတ်ယူခြင်း၊ ကုန်တင်ရွေ့လျားခြင်းနှင့် ပက်လက်ရေတွက်ခြင်း၊ လျင်မြန်သောပစ္စည်းများပေးပို့ခြင်းနှင့် စာရင်းစီမံခန့်ခွဲမှုတို့ကို လုပ်ဆောင်နိုင်ခြင်းတို့ကဲ့သို့သော လုပ်ဆောင်ချက်များပါရှိသည်။ ဘေးကင်းရေးကာကွယ်မှုနှင့် အမှားအယွင်းအချက်အလက်များကို အချိန်နှင့်တစ်ပြေးညီ တုံ့ပြန်မှုပေးစွမ်းနိုင်သည့် အတားအဆီးများကို ရှောင်ရှားနိုင်သော လုပ်ဆောင်ချက်နှင့် အမှားအယွင်းအချက်ပေးအချက်ပေးစနစ်တို့ ပါ၀င်သည်။ ဟာ့ဒ်ဝဲစနစ် ရှုထောင့်မှကြည့်လျှင် လေးလမ်းမောင်းယာဉ်တွင် ဖရိန်၊ ရုတ်သိမ်းသည့်ယန္တရား၊ မောင်းနှင်မှုယန္တရား၊ ဘီးအုပ်စု၊ ပါဝါထောက်ပံ့မှု၊ လျှပ်စစ်ထိန်းချုပ်မှုစသည့် အစိတ်အပိုင်းများဖြင့် ဖွဲ့စည်းထားသည်။
1) ယာဉ်ဖွဲ့စည်းပုံ
မော်ဂျူလာ ဒီဇိုင်းနည်းပညာကို အရည်အသွေးမြင့် သံမဏိဖြင့် ပေါင်းစပ်ဖွဲ့စည်းထားသည့် လေးလမ်းသွား ယာဉ်၏ ကိုယ်ထည်တည်ဆောက်ပုံကို အသုံးပြုထားသည်။ ယာဉ်၏ ဒီဇိုင်းဆွဲထားသော ခံနိုင်ရည်မှာ 1500 ကီလိုဂရမ်နှင့်အထက်ဖြစ်ပြီး အနိမ့်ဆုံးဘေးကင်းရေးအချက်မှာ 1.6 ဖြစ်ရန် အကြံပြုထားသည်။ ပစ္စည်းအထွက်နှုန်း 2.75 MPa; လေးလမ်းသွား ယာဉ်ကိုယ်ထည်တည်ဆောက်ပုံသည် ယာဉ်တစ်ခုလုံး၏ ယုံကြည်စိတ်ချရမှုနှင့် ဖွဲ့စည်းပုံ၏ ပေါ့ပါးမှုအတွက် အကောင်းဆုံးပြုလုပ်ထားသည်။
2) Jacking ယန္တရား
လေးလမ်းသွား ယာဉ်လည်ပတ်မှုတွင် အပေါ်မှအောက်နှင့် နောက်ပြန်လှည့်သည့် လုပ်ဆောင်ချက်များစွာ လိုအပ်ပြီး စက်ယန္တရား သို့မဟုတ် ဟိုက်ဒရောလစ်အပေါ်မှ အောက်သို့ ကိရိယာကို ဒီဇိုင်းထုတ်သင့်သည်။ စက်ပိုင်းဆိုင်ရာဖွဲ့စည်းပုံ၏ ဘေးကင်းမှု၊ ယုံကြည်စိတ်ချရမှုနှင့် တာရှည်ခံမှုကို ထည့်သွင်းစဉ်းစားကာ 40 mm lifting stroke နှင့် lifting time 3-5 seconds ထားရှိရန် အကြံပြုထားသည်။ လေးလမ်းသွားယာဉ်သည် ကြမ်းခင်းကို ရုတ်သိမ်းကာ လျှော့ချကာ ကုန်ပစ္စည်းများ ရုတ်သိမ်းခြင်းအား နောက်ပြန်ဆုတ်ခြင်းဖြင့် လည်ပတ်မှုသံသရာကို ပြီးမြောက်စေသည်။ လည်ပတ်မှု စွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်၊ လေးလမ်းမောင်းယာဉ်သည် လည်ပတ်မှု လည်ပတ်မှု တိုတောင်းစေရန် လည်ပတ်မှု လုပ်ငန်းစဉ်အတွင်း လျင်မြန်စွာ လျှော့ချပြီး နောက်ပြန်လှည့်ကြောင်း သေချာစေရန် လိုအပ်ပါသည်။
3) ယန္တရားနှင့် ဘီးများကို မောင်းနှင်ပါ။
လေးလမ်းမောင်းယာဉ်မောင်းနှင်ယန္တရားသည် လမ်းကြောင်းနှစ်ခုစလုံးတွင် လျင်မြန်သောကူးပြောင်းမှုကိုမြှင့်တင်ရန် servo motor drive၊ planetary deceleration နှင့် commutator ကိုလက်ခံပါသည်။ ပုံမှန်လည်ပတ်မှုအခြေအနေအောက်တွင်၊ no-load လည်ပတ်မှုအမြန်နှုန်းမှာ 1.4 m/s ~ 1.6 m/s ဖြစ်ပြီး၊ အပြည့်အ ၀ လည်ပတ်မှုမြန်နှုန်းမှာ 1.0 m/s ~ 1.2 m/s; စင်အဆင့်တွင် အလျားလိုက် ပြေးသည့်အခါ၊ လေးလမ်းမောင်းယာဉ်သည် X ဦးတည်ချက်တွင် 4 ဘီးယက်နှင့် Z လမ်းကြောင်းတွင် 8 ဘီးယက်ကို လက်ခံသည်။ 8 ဘီး (မောင်းနှင်ခြင်းနှင့် မောင်းနှင်သောဘီးများ ပေါင်းစပ်ခြင်း) ဂီယာမုဒ်ကို စနစ်ဒီဇိုင်းလိုအပ်ချက်များနှင့် ကိုက်ညီစေရန်အတွက် စက်အတွင်းပိုင်းစက်ပိုင်းဆိုင်ရာစနစ်၏ ရှုပ်ထွေးမှုကို လျှော့ချပေးကာ ယာဉ်၏လမ်းလျှောက်ခြင်းကို တည်ငြိမ်မှုရှိစေရန်အတွက် ရွေးချယ်ထားသည်။ လေးလမ်းမောင်းကားတစ်စီး ရွေ့လျားနေသည့်အခါ ၎င်း၏ဘီးများသည် ရေရှည်ပွတ်တိုက်မှုခံရနိုင်ပြီး ဝတ်ဆင်မှုခံနိုင်ရည်ရှိသောဘီးများ လိုအပ်သည်။ စွမ်းဆောင်ရည်စမ်းသပ်ပြီးနောက် polyurethane ဘီးများကို တာရှည်ခံစေရန်၊ ဆူညံသံများကို လျှော့ချပေးပြီး လုပ်ငန်းလည်ပတ်မှု တည်ငြိမ်မှုကို အာမခံပါသည်။

Hagrid HEGERLS pallet လေးလမ်းသွား လွန်းပျံယာဉ်၏ လိုက်လျောညီထွေရှိသော အလွှာပေါင်းစုံနှင့် မျိုးစုံယာဉ်လည်ပတ်မှုမုဒ်သည် အဝင်နှင့်အထွက် လည်ပတ်မှု၏ စွမ်းဆောင်ရည်ကို များစွာတိုးတက်ကောင်းမွန်စေပြီး ရိုးရာသုံးဖက်မြင်ကုန်လှောင်ရုံများ၏ တစ်ဆို့ပြဿနာကို ဖြေရှင်းပေးကာ လမ်းသွားလမ်းလာတစ်ခုတွင်သာ ဝင်ထွက်နိုင်သည် . မကြာသေးမီနှစ်များအတွင်း၊ ပြည်တွင်းနှင့်ပြည်ပကုန်လှောင်ရုံစျေးကွက်များ၏ အမှန်တကယ်လိုအပ်ချက်များအပေါ်အခြေခံ၍ Hebei Woke သည် အသစ်အဆန်းအသွင်အပြင်၊ လုပ်ဆောင်ချက်အပြည့်အစုံ၊ ဘေးကင်းမှုနှင့် ယုံကြည်စိတ်ချရမှုစသည့် နည်းပညာဆိုင်ရာအားသာချက်များဖြင့် Pallet လေးလမ်းသွားပြေးဆွဲသည့်ကားများကို တီထွင်ခဲ့သည်။ ပြည်တွင်းနှင့်ပြည်ပ အရောင်းအပြီးဝန်ဆောင်မှုစနစ်များအပြင်၊ အနာဂတ်တွင် Hebei Woke သည် ဉာဏ်ရည်ထက်မြက်သော ဂိုဒေါင်ဖွံ့ဖြိုးတိုးတက်မှု၏ ပြင်းထန်သောအရှိန်အဟုန်ကို အခိုင်အမာဆုပ်ကိုင်မည်ဖြစ်ပြီး ဖောက်သည်ဝယ်လိုအားကို တိမ်းညွှတ်မှုအား အမြဲလိုက်နာကာ မြင့်မားသောဉာဏ်ရည်နှင့် ဆုံးဖြတ်ချက်ချခြင်းကို ဆက်လက်ဆောင်ကြဉ်းပေးမည့် ဖောက်သည်များအတွက် ပေါင်းစည်းအသိဉာဏ်ရှိသော၊ သိုလှောင်ရုံခြုံငုံဖြေရှင်းချက်။
စာတိုက်အချိန်- မေလ ၁၉-၂၀၂၃